Figure 1: Marching Band Turning a Corner
Here’s a discussion of what it means to follow a straight path in a curved space. This requires a clear understanding of what we mean by “straight”. Given that, it is easy to demonstrate that the shortest path between two points is necessarily straight. We also discuss how to not get fooled by map projections. Sometimes a straight line on a map does not correspond to a straight line on the ground, and vice versa.
For starters, we need a robust, precise definition of what we mean by “straight”.
It helps to consider the actions of a marching band. When they are marching straight ahead, every rank and every file marches at the same pace. However, when any given rank wants to turn a corner, the musician on the outside of the turn must go farther and faster, while the one on the inside of the turn must travel a lesser distance at a lesser rate, as you can see in figure 1.
The same is true of a canoe. To go straight, you paddle equally on both sides. To turn, you paddle faster on the outside of the turn.
The same is true for robots. Suppose you build a Lego robot with one motor driving the left wheel and a separate motor driving the right wheel. If you want the robot to go straight, drive both motors at the same rate. If you want to turn, drive the motor on the outside of the turn at a higher rate.
The same is true for airplanes. For example, a Grumman AA-5 Tiger does not have any nosewheel steering. The nosewheel is freely castering. When you are taxiing, the rudder is useless, because it cannot develop sufficient aerodynamic force at such low airspeeds. The airspeed might be zero if you are taxiing with a tailwind. The only way to steer is by differential braking. You have independent control of the left and right mainweel brakes. If you tap the right brake, the aircraft will turn to the right.
To summarize: This is our operational definition of straight, in a two dimensional space: If your left side and your right side travel equal distances in any given interval of time, your path is straight.
If you want to generalize this 2D notion to 3D, you need a third trace, a third dashed line, so you can measure the length of a path that is offset vertically. Such a thing is certainly possible, for example in the lattice of girders in a truss bridge. Be that as it may, a marching band or a canoe has no access to the third dimension, so the 2D notion of straightness applies.
Suppose we have a proposed path between to points, and we wish to determine whether it is the shortest. One way to proceed is to shift the path a little to the left and a little to the right. If the left path is longer and the right path is shorter, the proposed path is not optimal. We can improve it by shifting it to the right. If necessary, we use smaller and smaller offsets so we are not affected by any nonlinearities.1
We continue this process until no further improvement is possible. That happens when the left-offset and the right-offset are equally short. This proves that the shortest path is straight, as defined in section 1.
The shortest path is necessarily straight, but a straight path is not necessarily shortest. A great circle that goes around the world the long way, more than 180∘, is straight but obviously not shortest.
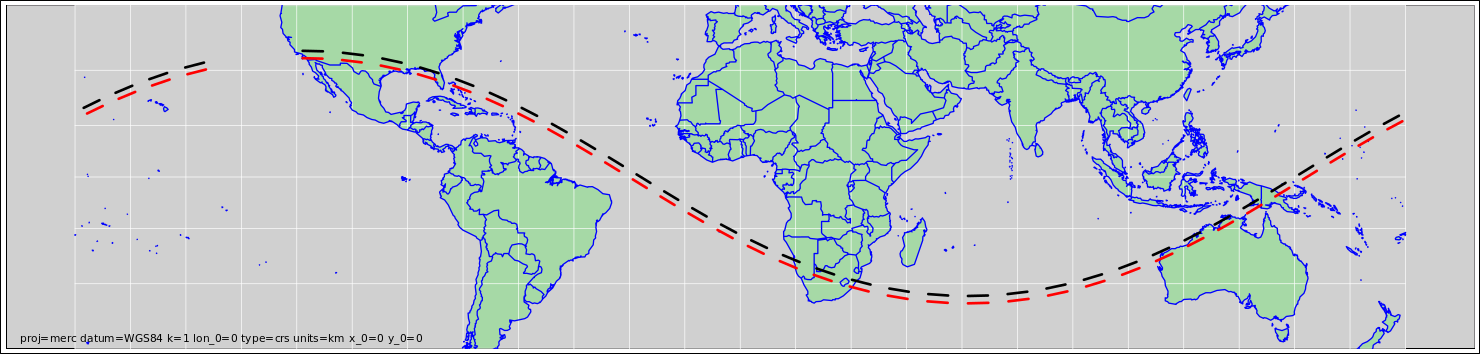
Suppose we depart Los Angeles on a heading of due east, and continue straight ahead. Straight means straight, as defined in section 1. Our path will be a geodesic. We call it a great circle.2 It will be the shortest path between any two points along the route, provided they are not unreasonably far apart. This path is shown in figure 2.
For more about how to understand geodesics, and how to construct models of curved spaces, see reference 3.
Like any great circle, except for the equator itself, this path will cross the equator twice before returning to the starting point.4
The black path is offset 100 km to the left of the great circle, while the red path is offset 100 km to the right. The red and black dashes are each 500 km long. You can see that they keep pace with each other perfectly. This is how you know that the great circle is in fact straight, as defined in section 1.
If you were to plot this path on a globe, you could easily see that it is a straight path in a curved space. It does not veer left or right.
We must distinguish what we see on the map versus what we see on the ground. The great circle is representented by a path that curves on the paper even though it does not curve in the real world.
This is unavoidable. The equator is a geodesic. The Los Angeles great circle is also a geodesic, and it crosses the equator twice. The map is flat, it’s hard to arrange for two straight lines in a flat space to cross each other twice.
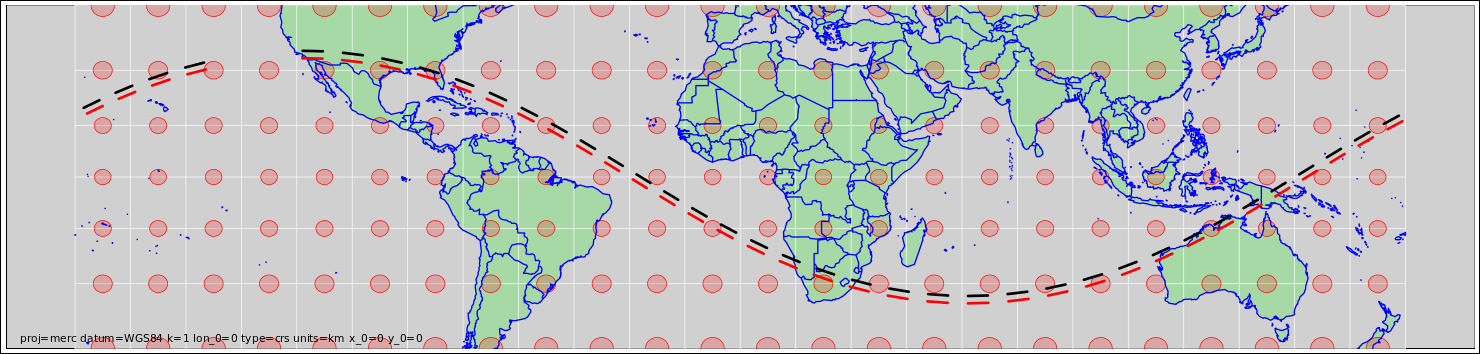
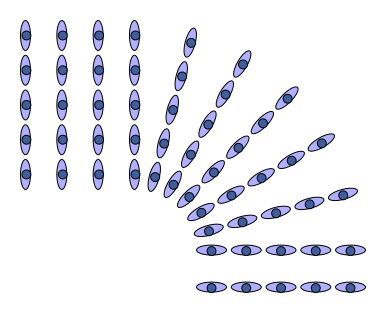
To understand this map, or any map, you need to know the scale. For a map of a small area, when the effects of curvature are negligible, you can get by with a single scale bar. However, for a large-area map, you need to know how the scale depends on position, and how it depends on direction. The best way to do this is by means of Tissot Indicatrices. 5 This is shown in light red in figure 3.
Loosely speaking, each Tissot Indicatrix represents a circle on the ground, 500 km in diameter.6 If the map scale is different in different directions, the Indicatrix will be an ellipse, as you can see in some of the examples in reference 5. However, figure 3 is using a Mercator projection, which is conformal, which means that at any given point the scale is the same in all directions. So in this case each Indicatrix is a circle.
Near the equator, this map projection has a scale that is the same everywhere. So straight paths on the ground are represented by straight lines on the map. You can see that the Los Angeles geodesic is straight on the paper (not just on the ground) when it is near the equator.
Farther from the equator, the scale is larger on the poleward side of the path, so the dashes that represent equal distance on the ground will be longer on the paper. This causes the path on the paper to bend, in close analogy to the marching band in figure 1.
Note: As we learned from Spinal Tap, if you get the scale factor wrong, it completely changes the meaning, as in figure 4. This applies to maps as well as blueprints.
You can calculate exactly how to draw a path on the map the corresponds to a straight line on the ground. This is called the geodesic equation, as discussed in reference 7. All you need to know is how the scale changes from place to place.
Furthermore, you can calculate the curvature of the space, the real space itself. All you need to know is how the scale changes from place to place on a map of the space. See reference 8
Conversely, if you don’t know how the scale factor changes from place to place on the map, you don’t know what the map means. You don’t even know whether the space it represents is flat or curved.
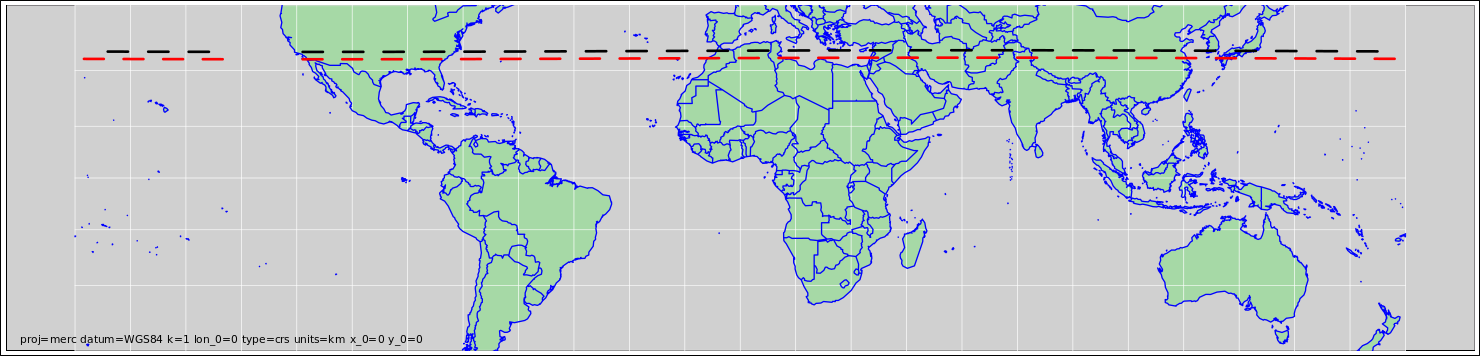
Let’s consider a new scenario, which lets us apply the same ideas in reverse. As before, we depart Los Angeles on a heading of due east. However, this time we do not follow the straight path. Instead we stick to a rhumb line, namely a line of constant latitude, as shown in figure 5.
The Tissot Indicatrix indicates the number of inches per mile. That is, inches on the map per mile on the ground.9
The map scale has more inches per mile (hence fewer miles per inch) on the poleward side of the path, the black path is shorter than the red path. The red side has to march faster in order to keep up. On the ground, that means we have to continually veer to the left in order follow the rhumb line.
Let’s be clear: This straight line on the map represents a curved path on the ground.