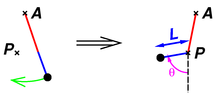
Figure 1: Interrupted Pendulum
Let us consider the classic problem of the interrupted pendulum, as diagrammed in figure 1. This is truly a classic, having been published in 1638 by some guy named Galileo.
This is traditionally known by the name stopped pendulum, but that name can be confusing.
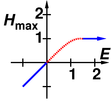
The task is to find Hmax, the maximum height to which the bob rises, as a function of initial conditions.
Here’s the scenario: We have a string anchored at some point A. At the other end of the string is a small, heavy bob, shown as a black disk in the diagram. This would be an ordinary pendulum, except that the swing is interrupted by a peg at point P.
There are many cases and sub-cases within this basic scenario, but for simplicity we consider only the part of the trajectory where the motion is determined by the peg – and by gravity and the other laws of physics. (This leaves out cases where the string misses the peg, and where the string hits something else besides the peg, et cetera.)
We make a number of additional assumptions that are “standard” in this sort of problem, namely that the string has negligible thickness, negligible mass, and negligible stiffness. We assume points P and A are fixed. We assume the peg has negligible size. We neglect all forms of friction.
We need not assume the anchor A is directly above the peg P.
As a consequence of previous assumptions, we do not care about the mass of the bob. (If you don’t believe this, you can re-do the calculation keeping M as an explicit parameter. Verify that the final answer is insensitive to M.) So WLoG (“Without Loss of Generality”) we can set M=1.
Also as a consequence of previous assumptions, we do not care about the total length of the string; all we care about is the length L from the peg to the bob. Furthermore, WLoG we choose our units of length such that L=1, so L also drops out of the problem.
Similarly WLoG we choose units of time such that the acceleration of gravity is g=1.
We define the angle θ to be the angle of the string, relative to the downward vertical, as shown in the diagram.
We define H to be the height of the bob, relative to the peg.
The bob has potential energy U proportional to height. WLoG we exercise our choice of gauge so that H=0 corresponds to U=0. (We are not necessarily assuming the bob ever reaches this height; this is just our “reference” level.) Obviously U is a function of time. As a consequence of previous assumptions, U is not only proportional to H, it is equal to H. That is, U=H always.
Remark: In cases where the string is not slack, we can write U = −M g L cos(θ) … or in view of previous simplifications, just U = H = −cos(θ). However, if you don’t know about sines and cosines, you can ignore this remark; trigonometry is not required to solve this problem.
The bob has kinetic energy K. Obviously K is a function of time.
The bob has total energy E = U + K. This is a conserved quantity, independent of time.
Let us begin by considering the low-energy case, such that |θ| remains less than 90 degrees. Our common knowledge of pendulums tells us that in this case, the string will not go slack. It also tells us that the bob comes to rest at the top of the swing. That is, K=0 at the top of the swing. Therefore we have the simple result that
| Hmax = E for E ∈ [−1, 0] (1) |
At the opposite extreme, the high-energy case is also simple. If there is plenty of energy, the bob goes right over the top, and the string winds around and around the peg, without ever going slack.
We need to calculate the minimum energy consistent with this outcome. It suffices to consider what happens at the very top of the motion, at the point directly above the peg. There will be a certain amount of centrifugal acceleration, C. We need C to be at least 1g, to maintain non-negative tension in the string.
It turns out that C = 2K in the marginal high-energy case, as you can verify by considering the familiar expressions K = ½ M v2 and FC = M v2 / L. Therefore, at the top of the swing, the bob must have total energy E = 1.5 (one-half unit of kinetic energy, to keep the string under tension, plus one unit of potential energy). That is:
| Hmax = 1 for E ≥ 1.5 (2) |
At this point, we already know enough to do a pretty good job of answering the question that was posed, by sketching Hmax as a function of energy. This is shown in figure 2.
We know the exact solution for E in the interval [−1, 0], namely Hmax = E, as discussed in section 1.1. We also know the exact solution for E greater than 1.5, as discussed in section 1.2.
We can sketch the curve in the intermediate region rather accurately, since we expect it to be a smooth function of E. In fact, we can use a cubic spline, determined by the conditions of unit slope at the point (0, 0) and zero slope at the point (1.5, 1). Right now this is just an estimate, but it turns out to be a verrry good estimate, as we shall see in the next section.
Now let’s consider the intermediate case, shown in red in figure 2. This is the case where the string goes slack before the bob reaches its maximum height.
Let’s analyze the point where the string first begins to go slack. This point is determined by the criterion that the component of the gravitational acceleration in the direction of the string just balances the centrifugal acceleration. This radial component is just g H, or simply H in the units we are using. You can derive this result using trigonometry (−g cos(θ) = g H). You can also derive it without trigonometry, just using arguments about similar triangles.
Once again, the centrifugal acceleration is 2K, which is equal to 2E − 2H. Let’s use S to denote the special height where the string begins to go slack. Equating the radial component of gravity to the centrifugal acceleration, we find
| (3) |
You can verify that this result is consistent with what we already know happens at E=0 and E=1.5.
At the moment the string begins to go slack, the bob has some velocity v. We need not calculate v, but we know v has a horizontal component and a vertical component. The horizontal component is proportional to H; when H=0, the horizontal component is zero, and when H=1, the horizontal component is 100% of the velocity.
The horizontal part of the kinetic energy is therefore proportional to H2.
That means that we can write the kinetic energy as
| K = (H2) K + (1−H2)K (4) |
where the first term on the RHS is due to the horizontal motion, and the second term is due to the vertical motion. In particular, at the point where the string begins to go slack, the total energy is:
| (5) |
where we have used the fact that K=S/2 from equation 3.
At the top of the swing, there is no vertical velocity, and the height is Hmax, so the energy is
| E = Hmax + (S2) S/2 (6) |
where the last term represents the horizontal kinetic energy, which is a constant of the motion when the string is slack.
Comparing equation 5 with equation 6, we find that
| Hmax = S + ½ S(1−S2) for S ∈ [0,1] (7) |
where S = (2/3)E. You can verify this function goes through the points (E, Hmax) = (0, 0) and (1.5, 1) and has the expected slope in each case (slope=1 and slope=0, respectively).
We have now answered the original question. Equation 1, equation 7, and equation 2 cover all the possibilities. This is depicted in figure 2.
We can now confirm that the spline conjectured in section 1.3 was exactly correct.
Galileo was primarily interested in the low-energy case. He was also quite aware of the high-energy (wrap-around) case. I am not aware that he ever worked out the intermediate (slack) case.
Just for fun, we consider in a theoretical way the accelerations experienced by an observer riding a swing set with a very large amplitude, large enough to go completely over the top – or, equivalently, an observer in an aircraft performing a loop-de-loop.
Note! This is an incomplete theoretical analysis, describing a Gedankenexperiment only. Do not attempt this with anything bigger than a small toy, unless you have done a complete analysis including all the practical issues. Do not attempt this in a real aircraft, unless you have received thorough aerobatic training from a certified flight instructor. You are responsible for understanding the risks and performing a complete analysis including safety margins.
For the swing set, it is important to consider the marginal case where the bob has just barely enough energy to go around and around, without going slack. At the top of the swing, the observer is weightless (in his frame, i.e. the frame comoving with the bob). This can be thought of as one g of ordinary terrestrial gravity, opposed by one g of centrifugal acceleration in the opposite direction. The bob has 0.5 units of kinetic energy at this point, and 1.5 units of total energy.
We now continue the trajectory all the way to the bottom. On the way down, the bob picks up two units of kinetic energy, for a total of 2.5, and therefore the observer will experience six gs of acceleration downward: five gs of centrifugal acceleration, plus one g of terrestrial gravity in the same direction.
This means that if you wish to perform a loop-de-loop, in the constant-energy approximation, maintaining no slack all the way around, you should be prepared to withstand six Gees at the bottom ... which is enough to be quite noticeable!
The non-marginal case is also feasible. If the system has more energy, there will be more tension in the string all the way around.
If you replace the string by a strut, you can have essentially zero velocity at the top of the swing. In this case you will pull at least five Gees at the bottom, in the constant-energy approximation.