The definition of work suffers from one major problem plus several minor nuisances.
The major problem is that there are two perfectly good but inconsistent notions:
These two notions are closely related but certainly not identical. This is an instance of the boundary/interior issue, as discussed in section 8.6. This is a recipe for maximal confusion. (Wildly different ideas are easily distinguished, and identical ideas need not be distinguished.)
Within the force-times-distance family, there are the following nuisance factors, which will be discussed below:
We start by considering the case where the energy is a nice differentiable function of state, and is known as a function of two variables V and S alone. Then we can write
| (18.1) |
which is just a repeat of equation 7.5 and equation 7.8. This gives us the differential formulation of work, as follows:
| The first term on the RHS, namely −P dV, is commonly called the work done on the system. Positive work done on the system increases the energy of the system. | The negative thereof, namely P dV, is the work done by the system. Positive work done by the system decreases the energy of the system. |
As an elaboration, consider the common case where V itself is known as a differentiable function of some other variables (say) A, B, and C.
We can differentiate V to obtain
| dV = |
| ⎪ ⎪ ⎪ ⎪ |
| dA + |
| ⎪ ⎪ ⎪ ⎪ |
| dB + |
| ⎪ ⎪ ⎪ ⎪ |
| dC (18.2) |
and plug that into equation 18.1 to obtain
| (18.3) |
We can write this more compactly as:
| (18.4) |
where we have defined the notion of force in a given direction according to:
| FA|B,C := − |
| ⎪ ⎪ ⎪ ⎪ |
| (18.5) |
and similarly for the other directions. Compare equation 7.30.
It is conventional but very risky to write FA (meaning force “in the A direction”) as shorthand for FA|B,C. This is risky because the notion of “the A direction” is not well defined. It is OK to speak of the direction of constant B and C, but not the direction of changing A. Specifically, in example #2, when we evaluate ∂E / ∂A, we get very different results depending on whether we evaluate it at constant B or at constant V.
There is no reliable, general way to disambiguate this by assuming that B and C are the directions “perpendicular” to A. As an aside, note that in the two examples above, if A and B are interpreted as position-vectors in real space, they are definitely not perpendicular. More to the point, when A and B are interpreted as part of the abstract thermodynamic state-space, we cannot even define a notion of perpendicular.
In the present context, FA is unambiguous because FA|B,C is by far the strongest candidate for what it might mean. But in another context, the symbol FA might be highly ambiguous.
We can convert to the integral formulation of work by integrating the differential representation along some path Γ. The work done by the system is:
| workby[Γ] = | ∫ |
| P · dV (18.6) |
Consider the contrast:
| The differential formulation of work (PdV) is a vector, specifically a one-form. A one-form can be considered as a mapping from pointy vectors to scalars. | The integral formulation of work (workby[⋯]) is a functional. It is a mapping from paths to scalars. |
In particular, if Γ is a path from point X to point Y, you should not imagine that the work is a function of X and/or Y; rather it is a functional of the entire path. If PdV were a grady one-form, you could express the work as a function of the endpoints alone, but is isn’t so you can’t.
For each length scale λ, we get a different notion of work; these include microscopic work, mesoscopic work, and holoscopic work (aka macroscopic work, aka pseudowork, as discussed in section 18.5). These are all similar in spirit, but the differences are hugely important. To illustrate this point, consider a flywheel in a box:
More generally, there are innumerable gray areas, depending on the length scale λ.
In thermodynamics, it is usually – but not necessarily – appropriate to assume that “work” refers to either mesoscopic or holoscopic work.
Sometimes it is useful to consider the force and displacement acting locally on part of the boundary, and sometimes it is useful to consider the overall force and overall displacement.
To say the same thing in mathematical terms, let’s multiply both sides of equation 18.2 by P to obtain:
| P dV = FA|B,C dA + FB|C,A dB + FC|A,B dC (18.7) |
In some contexts, it would make sense to speak of just one of the terms on the RHS as “the” work.
Let’s consider systems that have some internal structure.
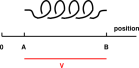
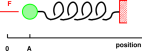
Our first example is shown in figure 18.3, namely a spring with a massive bob at one end. The other end is anchored. The mass of the spring itself is negligible compared to the mass of the bob. Dissipation is negligible. I am pushing on the bob, making it move at a steady speed v ≡ dA/dt. This requires adjusting the applied force F so that it always just balances the force of the spring.
When we ask how much “work” is involved, we have a bit of a dilemma.
| It certainly feels to me like I am doing work on the spring+bob system. Energy is flowing across the boundary from me into the bob. | The overall work on the spring+bob system is zero. The force of my push on one end is exactly balanced by the force of constraint on the other end. Zero total force implies zero macroscopic work (aka pseudowork). Having zero macroscopic work is consistent with the work/KE theorem, since the KE of the system is not changing. |
This dilemma does not go away if we break the system into sub-systems. The applied force on the bob is just balanced by the force of the spring, so there is no net force (hence no overall work) on the bob considered as a subsystem. The same goes for each small subsection of the spring: No net force, no acceleration, no work, and no change in KE.
The “local work” at the moving end is F · dx.
The “local work” at the fixed end is zero, since it is F · 0.
It is OK to think of energy pouring into the spring as a whole at the rate dE/dt = F · v. It is OK to think of energy as being like an abstract fluid flowing across the boundary.
It seems highly problematic to treat work as if it were a fluid flowing across the boundary. In particular, a naive attempt to apply the work/KE theorem is a disaster, because the energy inside the spring is virtually all potential energy; the KE inside the spring is negligible. The alleged work-fluid is flowing into the spring from the bob, and not flowing out anywhere, yet no work or KE is accumulating inside the spring.
As a second example, consider the oil bearing in section 11.5.5. Again we have a boundary/interior issue. Again we have a dilemma, due to conflicting definitions of work:
| I am doing work in the sense of force (at a given point) times distance (moved by that point). I am doing work in the sense of pouring net energy across the boundary of the system. | There is no overall force, no overall work, no acceleration, and no change in KE. |
Part of the lesson here is that you need to think carefully about the conditions for validity of the work/KE theorem. A non-exhaustive list is:
There are some interesting parallels between the oil bearing and the spring:
If you want a third parallel system, consider a force applied to a free body, such as the bob in figure 18.3 without the spring and without the anchor. Energy and momentum flow into the system and accumulate. The accumulated energy takes the form of non-Locrian kinetic energy.
From this we see that the work/KE theorem is intimately connected to the accumulation of momentum within the system, not the accumulation of energy per se.
A related thought is that momentum is conserved and energy is conserved, while work (by itself) is not conserved. KE (by itself) is not conserved.
Keep in mind that “work” is ambiguous. If you decide to speak in terms of work, you need to spell out exactly what you mean.
Also keep in mind that dissipative processes commonly convert mesoscopic KE into microscopic KE as well as non-kinetic forms of energy. Energy is conserved; mesoscopic KE is not (by itself) conserved.
You can’t hide momentum; if an object has momentum its center-of-mass will be moving, and this will be easy to notice. In contrast, you can easily hide energy in an object’s internal degrees of freedom, perhaps in the form of spinning flywheels, taut springs, random microscopic energy, or other things having nothing to do with center-of-mass motion.
Here is an example of hidden energy: Consider a cart with two flywheels on board. Initially everything is at rest. Apply a pair of forces (equal and opposite) to the front flywheel, causing it to spin up, clockwise. Apply a similar pair of forces to the back flywheel, causing it to spin up, counterclockwise. The net force on the cart is zero. The motion of the cart’s center of mass is zero. The net force dot the overall motion is zero squared. The cart’s overall angular momentum is also zero. Yet the cart has gained kinetic energy: internal, mesoscopic kinetic energy.
Examples like this are a dime a dozen. In some sense what we are seeing here is the difference between holoscopic and mesoscopic kinetic energy. If you don’t recognize the difference, and recklessly talk about “the” kinetic energy, you’re going to have trouble.
Sometimes it is appropriate to focus attention on the coarsest level of course-graining. We continue using the ideas and notation introduced in section 18.1.2.
In the large-λ limit we have:
| (18.8) |
where P = ∑pi is the total momentum of the system, M := ∑ mi is the total mass, Ftot := ∑Fi is total force applied to the system, and xcm is the distance travel led by the center of mass. This is similar in form to equation 18.6, but the meaning is different. See reference 18 for a derivation and discussion.
The RHS of equation 18.8 is called the pseudowork. The LHS represents the change in something we can call the pseudokinetic energy. This is just a synonym for the holoscopic kinetic energy.
There is an easy-to-prove theorem that says that for any length scale λ, an object’s total KE[λ] measured in the lab frame is equal to the KE[λ] of the relative motion of the components of the object (i.e. the KE[λ] measured in a frame comoving with the CM of the object) … plus the holoscopic KE associated with the motion of the CM relative to the lab frame (as given by equation 18.8).
Mesoscopic work and holoscopic work (aka pseudowork) are consistent with the spirit of thermodynamics, because they don’t require knowing the microscopic forces and motions.
However, the pseudowork is not equal to the “thermodynamic” w that appears in the oft-abused equation 7.5. Here’s a counterexample: Suppose you apply a combination of forces to a system and its center of mass doesn’t move. Then there are at least three possibilities:
According to the meaning of w usually associated with equation 7.5, w is zero in the first case, nonzero in the second case, and who-knows-what in the third case. It is a common mistake to confuse w with work or pseudowork. Don’t do it.